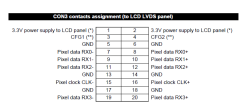
So I’m already way behind documenting again … as always 😉
Since I’m fed up with not getting my name associated with my articles/projects @shackspace I will reduce my projects/commintment towards shackspace/writing for the shackspace’s blog and focus on more on getting my stuff done and just publish on my blog.
It seems I’m the first person on _the internetz_ to attach more than 16 screens to a single computer. *wohoo*
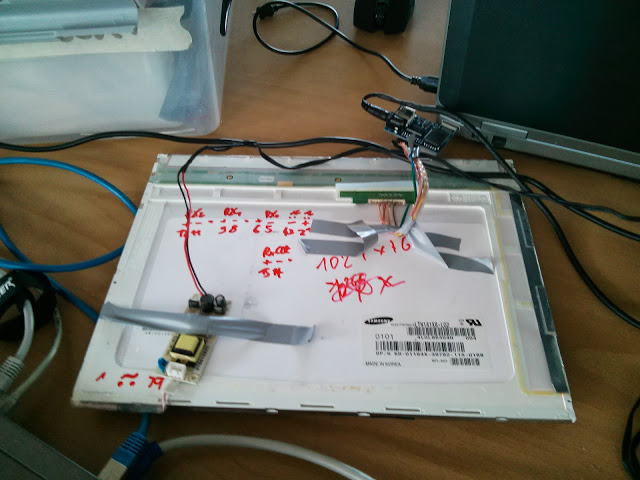
This project began when h0uz3 told me about having 2 pallets of broken Samsung 940B screens in his attic – 26 to be precise.
I was preparing for giving a workshop on repairing said monitors (ordering bags of elkos and fuses) on planned obsolescence on 26.05. but ended up planning and establishing Repaircafe @shackspace with Dirk instead. People brought enough electric stuff to fix so I just didn’t take care about the monitors and just helped were I could.
I’ll write a separate article on how to fix those 940B’s/lcd’s in general.
With the 26 dead monitors in mind – I thought I could fix at least 20. Getting those on a wall and finding a means of driving them posed challenge enough to just do it.
The goal was to build a poor mans video wall – and I thought it could be done finding the cheapest 5x PCI-E X16 motherboard available + 5 aged dual-gpu, dual head nvidia graphics cards.
I didn’t even know before buying that the graphics cards had 2 separate gpu’s (though 2 minutes on google would have told me) – but I just ordered a pack.
Next up I found the Asrock X79 Extreme 7 that looked like it could do what I wanted to achieve.
^^ never was I so wrong. Freaking SucksASSrock. Never again will I buy an ASSrock board … anything.
The first time my brand new mainboard went up in smoke because of a bent CPU pin.
I got lucky and the CPU didn’t die along with it.
I waited for the replacement part for a few weeks and tried getting all the
graphics cards to work trying multiple OS‘.
I found out the hard way that there’s an obstacle getting more than 8 gpu’s to run in a system.
You wouldn’t expect that and you wouldn’t come across this problem unless you tried.
Also there seems to be a problem for a lot of bios‘ out running into a 32 bit addressing
problem having so many gpu’s.
That didn’t affect my ASRock > X79 Extreme7’s bios though.
So I tried Windows 7 first – because of my good experience regarding multi-screen setups
in Windows OS‘ over the years – but it will only make 8 gpu’s available. The rest
shows up with an exclamation mark in system manager.
You can disable a working gpu and will get a different working (thus assuring there are no
hardware defects).
Next up I gave Windows 8 a quick spin – which imho is an abomination, but let’s not speak
of that here – and it showed no improvements over Win 7 regarding the 8 gpu limit whatsoever.
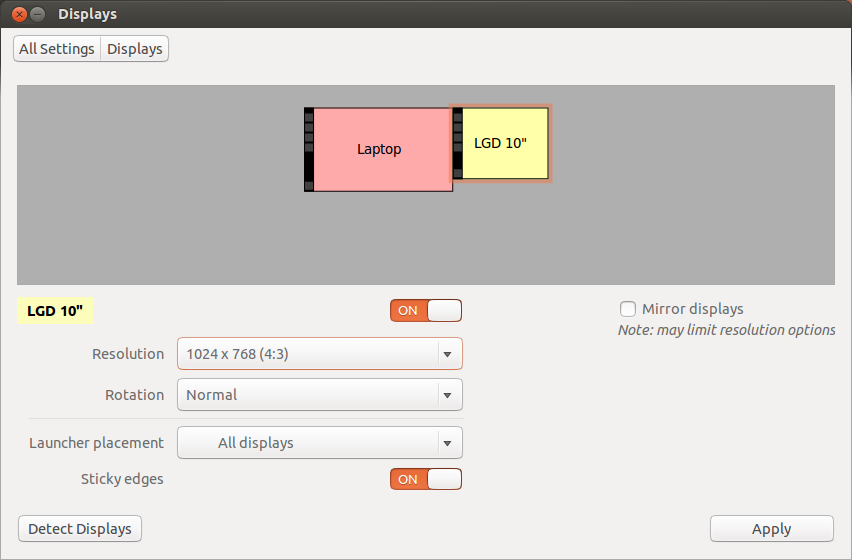
I tried the latest ubuntu version – as well as a 9.10 install – since the used graphics cards are already somewhat aged –
but again couldn’t get more than 8 GPU’s running – attaching the 5th (dual gpu) card would
always result in a crashed X server.
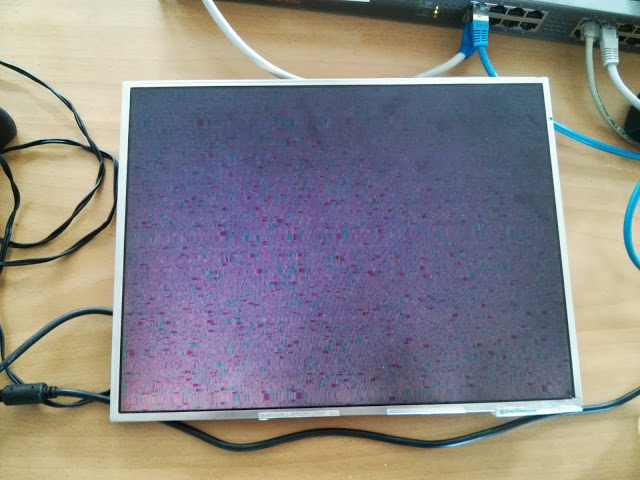
I sucessfully got 16 screens working with the nvidia proprietary driver and my last hope relied
on the nouveau driver (with not too high hopes of success either).
I deinstalled the nvidia proprietary drivers and after an attempted reboot my screens didn’t turn on anymore.
Trying to figure out the cause I came to the conclusion that either the mainboard or
the horribly expensive i7-3930 were to blame.
Since no one I know had either a socket 2011 board nor a CPU I got stuck again.
Last weekend I sat down enjoying momo and Jules half day at a time writing the xorg.conf
by hand (and let me assure you it’s a lot of work keeping track of the 10 different gpu identifiers as
well ass the dualhead ones whilest they keep changing with every added graphics card)